Polaris Redesign: Simplifying the Weapon System
My 1-pound plastic antweight gets a mechanical overhaul

The best robots in each weight class are ranked throughout the year, and the top-ranked competitors earn invitations to the Robot Combat League National Championships. For plants (plastic antweights, 1 pound), only the top 32 robots in the world qualify. This year, Polaris ranked high enough to receive an invitation to compete at nationals in Salt Lake City on June 19th. I'm hoping to make the trip; stay tuned for how it goes.
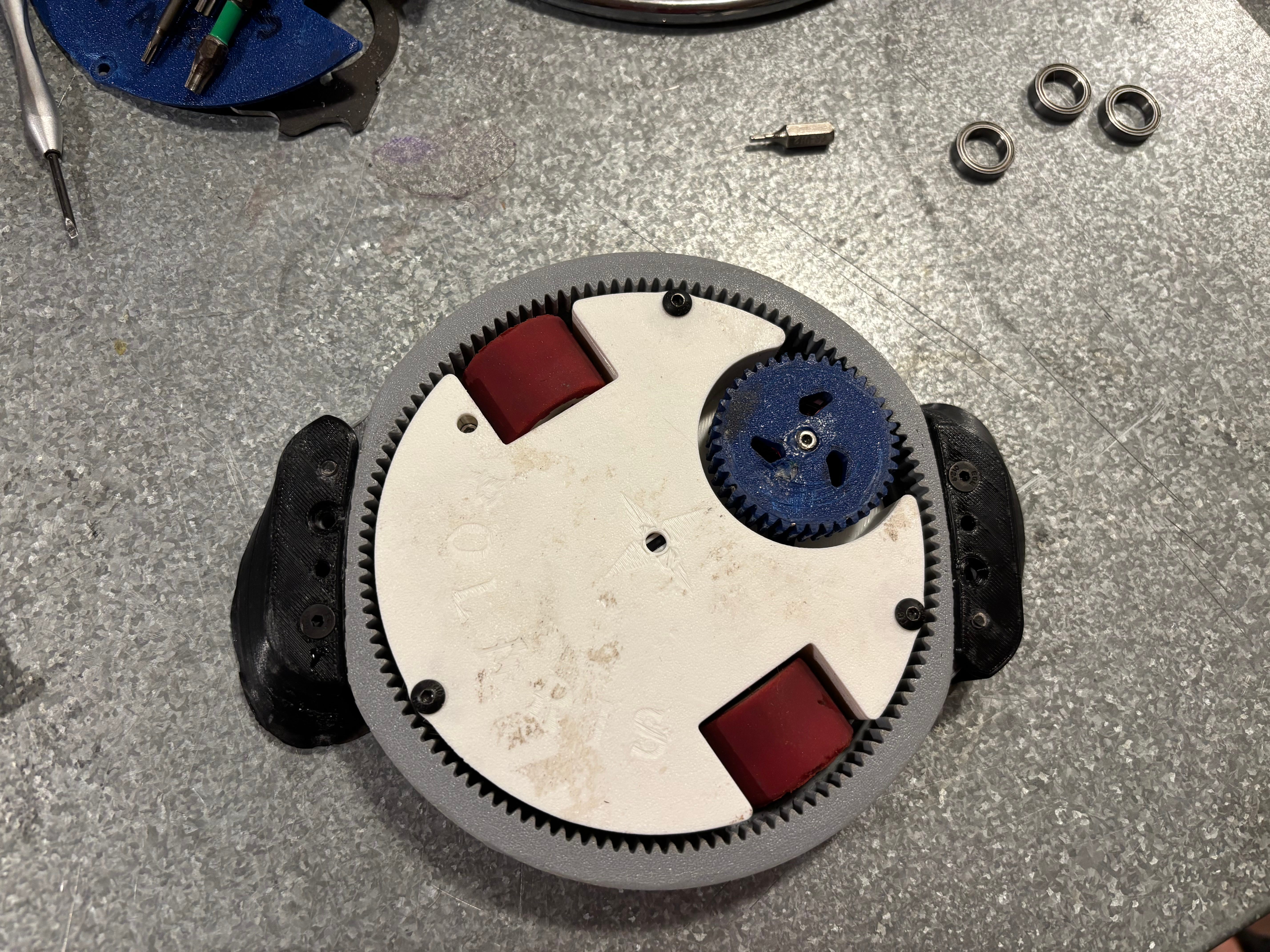
It’s been about a year since I’ve made any substantial changes to Polaris, my 1-pound plastic ring spinner. I’ve been running the exact same weapon ring for about 8 months, competing at multiple events. The bot is like a brick, it just doesn’t break. That durability is great, but the mounting system for the drive gear has been a persistently weak point. The little suspension arm that kept tension on the outer ring would either snap off or melt away at an angle, leaving the weapon struggling to stay spun up during matches.
After watching Polaris get shredded in a full combat bracket at Chico State University’s Robotronica recently (I’ll write more on this later), I decided it was time to address the core design problem. Fighting my plastic bot with metal bots really helped me see the design flaws, and I came up with a lot of new creative fixes that I think will make Polaris a lot stronger.

I’ve decided to make two major changes, both of which are experimental:
First, I’m eliminating the suspension arm entirely. The arm was there to keep the gear safe and maintain tension on the outer ring, but it kept failing. A lot of other ring spinner builders just mount their gears directly to the chassis, and it seems to work fine for them. I figured I’d test that approach. If the mounting can handle the forces without that extra complexity, it solves the melting and snapping problem completely.
Second, I’m switching to new bearings recommended by another builder who runs the number one ranked plastic antweight ring spinner in the country. He sent me a link to the bearings he uses and showed me his mounting technique. I’m hoping this makes the ring smoother and more stable during matches.
These changes are mostly educated guesses. I don’t really know what’s going to happen until I test them in competition. The suspension arm seemed necessary when I first designed Polaris, but experience has shown it’s also the failure point. Sometimes the simplest solution is just to remove the problem entirely.
I’ve been so focused on building Overtone, my 3-pound full combat hammer saw, that Polaris has taken a back seat. Throwing Polaris (a plastic 1 pound bot) into a full combat antweight (1 pound metal bots) bracket at Robotronica reminded me how tough the design is. The weapon ring survived multiple fights against metal bots before finally getting damaged enough to retire. That gives me confidence that if I can solve the mounting issue, this bot could actually compete in full combat divisions, especially with a few minor upgrades (e.g. metal teeth on the ring for better damage output).
I’m planning on ordering some new motors for Polaris that were recommended by another bot builder. The current motors seem fine, but if there’s room for improvement, I want to test it. This is the whole point of building robots, and really engineering design in general: try something, see what breaks, fix it, and try again.